


- 2026-08-06 10:36 2098
- 产品价格:面议
- 发货地址:上海青浦 包装说明:不限
- 产品数量:10000.00 个产品规格:不限
- 信息编号:259059859公司编号:14194598
- 陶念源 销售 微信 13636607932
- 进入店铺 在线留言 QQ咨询 在线询价
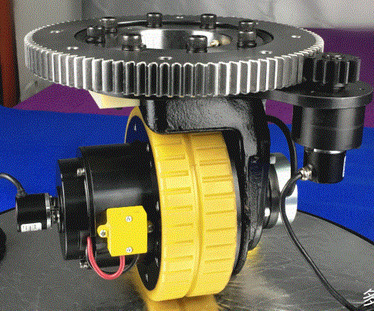
agv双轮差速驱动 揭阳AGV小车从动轮厂家
- 相关产品:
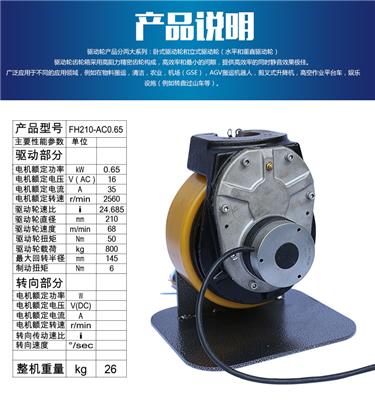
功率:200-1500W负载:0-10T定制:可以非标定制电压:直流48V或者24V速度:任意设置
AGV属于轮式移动机器人,按照移动特性又可将移动机器人分为两种: 非移动机器人和移动机器人。物体在平面上的移动可产生前后,左右和自转3个自由度的运动。若所具有的自由度少于3个则为非移动机器人;若具有完全的3个自由度,则称为移动机器人。
差动轮AGV
优点:差动轮AGV通过两轮的差动来实现转向,转向时的半径,速度,角速度,都由两个差动轮来确定。可以实现原地打转等动作,有比较强的灵活性。差动轮AGV对电机和控制精度要求不高,因而成本低廉。
缺点:差动轮AGV运行精度较低,无法适应对精度要求高的场合。
AGV主要的导引方式:电磁感应导引,光带导引,激光导引引,视觉导引,超声波导引,GPS导引等。AGV的运载方式可以根据需求进行定制,并没有固定的形式,因而灵活多变。但按照大类区分,主要可以分为以下几类:背驮式,潜伏式,叉车式等等
产品说明:
驱动轮轮径:150mm;
安装高度:190mm;
驱动轮行走电机:48V/200-400W;
转向电机:48V/50W-70W;
行走和转向配备编码器;
选配电子限位、机械限位;
单轮额定负载:500KG;
适用1T车型(双舵轮机构)。
agv小车指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源,一般可通过电脑来控制其行进路线以及行为。
agv小车底部通过驱动轮控制agv小车的移动,现有的agv小车驱动轮通过螺栓与agv小车底板进行锁固,但未对驱动轮的平行效果进行**,容易导致前后两侧的驱动轮产生平行偏差,影响agv小车驱动轮的驱动轨迹。













{kind=link}