

- 2024-12-24 08:38 998
- 产品价格:面议
- 发货地址:上海青浦 包装说明:不限
- 产品数量:10000.00 个产品规格:不限
- 信息编号:248017133公司编号:14194598
- 陶念源 销售 微信 13636607932
- 进入店铺 在线留言 QQ咨询 在线询价
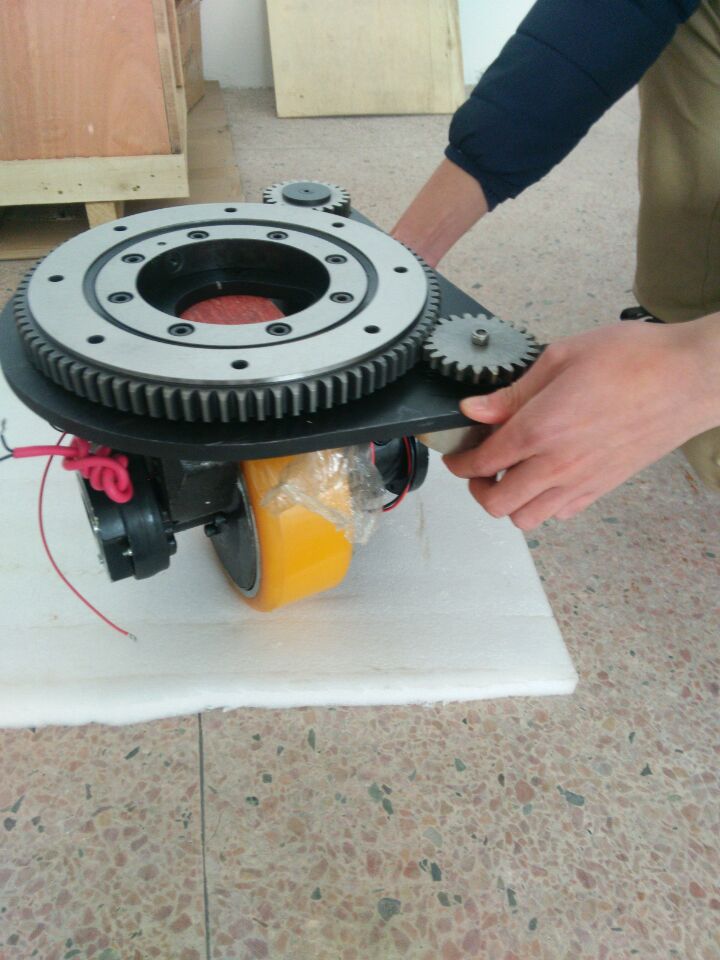
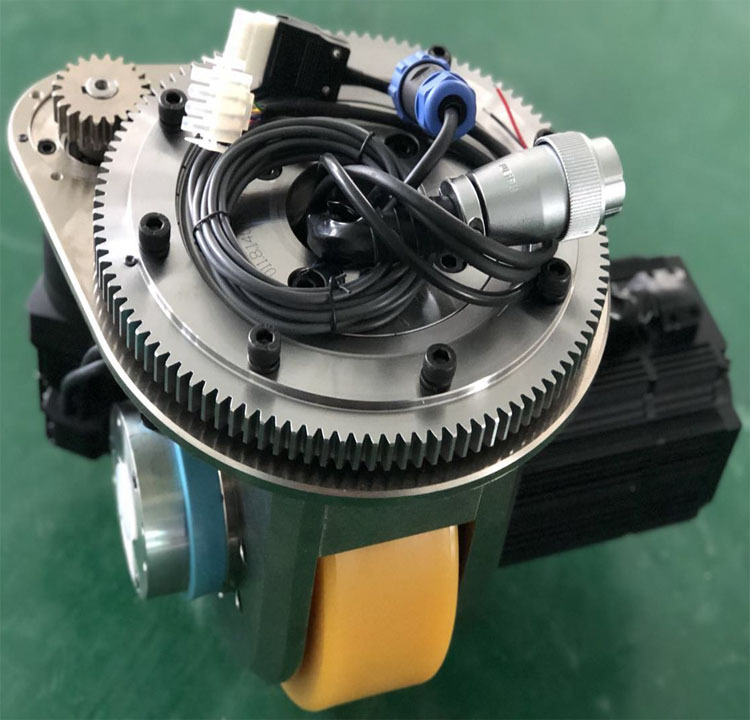
agv减速电机 莆田400WAGV小车从动轮
- 相关产品:
功率:200-1500W负载:0-10T定制:可以非标定制电压:直流48V或者24V速度:任意设置
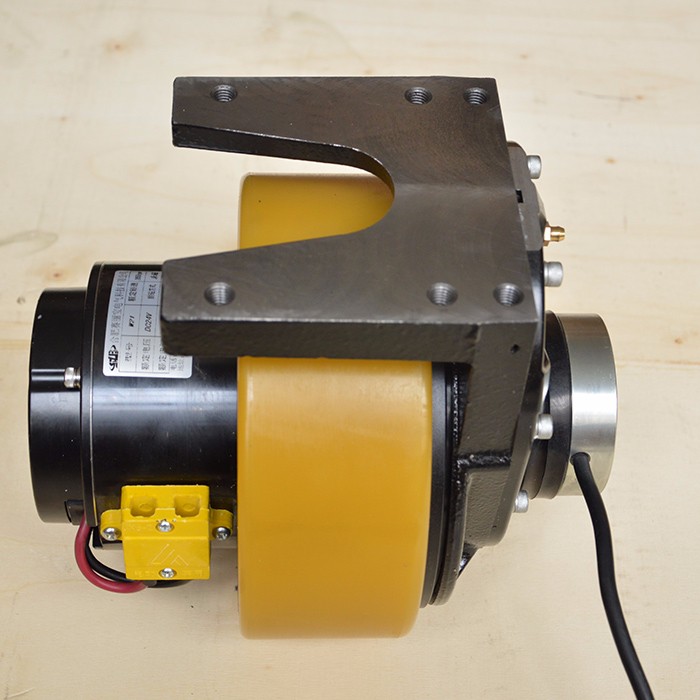
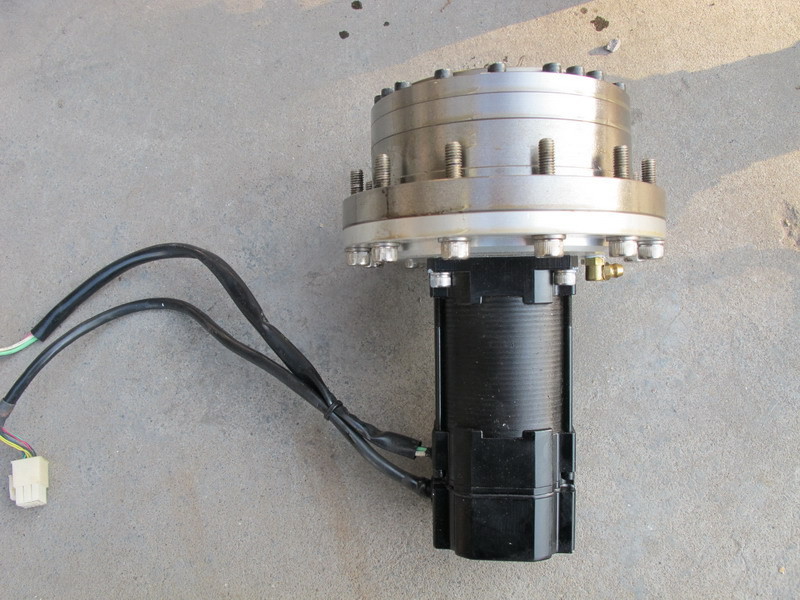
产品说明:产品满足AGV小车全向行走,行走电机选用直流永磁无刷电机,转向电机选用伺服电机,电机类型可根据客户要求更换不同类型电机,产品满足8T以内的自动化设备行走(两个舵轮+4个轮)。行走电机参数:
额定功率:1000;
额定电压:48V;
额定转速:3000r/min;
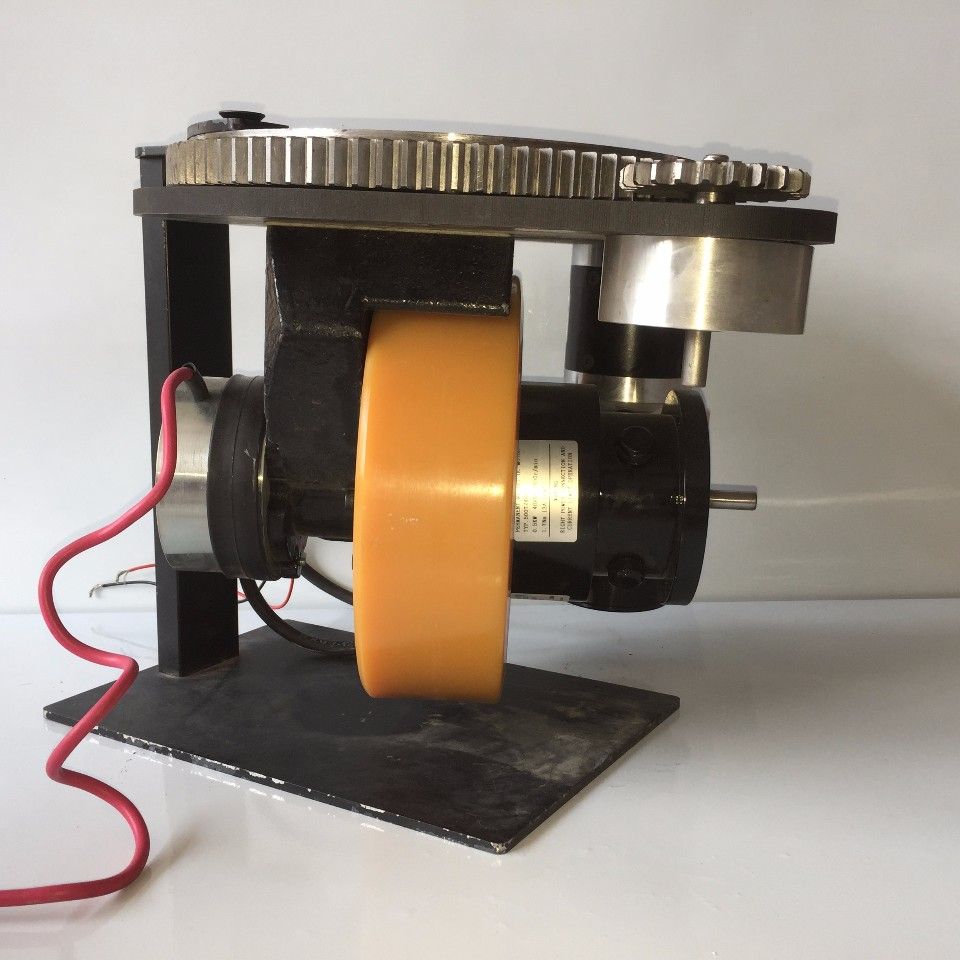
转向电机参数:
额定功率:400W;
额定电压:48V;
额定转速:3000r/min;
配备行走编码器:(编码器:sick)。

5.危险场所和特种行业
在军事上,以AGV的自动驾驶为基础集成其他探测和拆卸设备,可用于战场排雷和阵地侦察,英方正在研制的MINDER Recce是一辆侦察车,具有探测、销毁及航路验证能力的自动型侦察车。在钢铁厂,AGV用于炉料运送,减轻了工人的劳动强度。在核电站和利用核进行保鲜储存的场所,AGV用于物品的运送,避免了危险的。在胶卷和胶片仓库,AGV可以在黑暗的环境中,准确可靠的运送物料和半成品。

AGV从发明至今已经有60年的历史,随着应用领域的扩展,其种类和形式变得多种多样。常常根据AGV自动行驶过程中的导航方式将AGV分为以下几种类型:
1.电磁感应引导式AGV
电磁感应式引导一般是在地面上,沿预先设定的行驶路径埋设电线,当高频电流流经导线时,导线周围产生电磁场,AGV上左右对称安装有两个电磁感应器,它们所接收的电磁信号的强度差异可以反映AGV偏离路径的程度。AGV的自动控制系统根据这种偏差来控制车辆的转向,连续的动态闭环控制能够保证AGV对设定路径的稳定自动跟踪。这种电磁感应引导式导航方法在绝大多数商业化的AGVS上使用,尤其是适用于大中型的AGV。
2.激光引导式AGV
该种AGV上安装有可旋转的激光扫描器,在运行路径沿途的墙壁或支柱上安装有高反光性反射板的激光定位标志,AGV依靠激光扫描器发射激光束,然后接受由四周定位标志反射回的激光束,车载计算机计算出车辆当前的位置以及运动的方向,通过和内置的数字地图进行对比来校正方位,从而实现自动搬运。
该种AGV的应用越来越普遍。并且依据同样的引导原理,若将激光扫描器更换为红外发射器、或超声波发射器,则激光引导式AGV可以变为红外引导式AGV和超声波引导式AGV。
3. 视觉引导式AGV
视觉引导式AGV是正在快速发展和成熟的AGV,该种AGV上装有CCD摄像机和传感器,在车载计算机中设置有AGV欲行驶路径周围环境图像数据库。AGV行驶过程中,摄像机动态获取车辆周围环境图像信息并与图像数据库进行比较,从而确定当前位置并对下一步行驶做出决策。
这种AGV由于不要求人为设置任何物理路径,因此在理论上具有的引导柔性,随着计算机图像采集、储存和处理技术的飞速发展,该种AGV的实用性越来越强。
此外,还有铁磁陀螺惯性引导式AGV、光学引导式AGV等多种形式的AGV。
AGV属于轮式移动机器人,按照移动特性又可将移动机器人分为两种: 非移动机器人和移动机器人。物体在平面上的移动可产生前后,左右和自转3个自由度的运动。若所具有的自由度少于3个则为非移动机器人;若具有完全的3个自由度,则称为移动机器人。






{kind=link}