
- 2025-02-10 11:03 1618
- 产品价格:面议
- 发货地址:上海青浦 包装说明:不限
- 产品数量:10000.00 个产品规格:不限
- 信息编号:244238733公司编号:14194598
- 陶念源 销售 微信 13636607932
- 进入店铺 在线留言 QQ咨询 在线询价
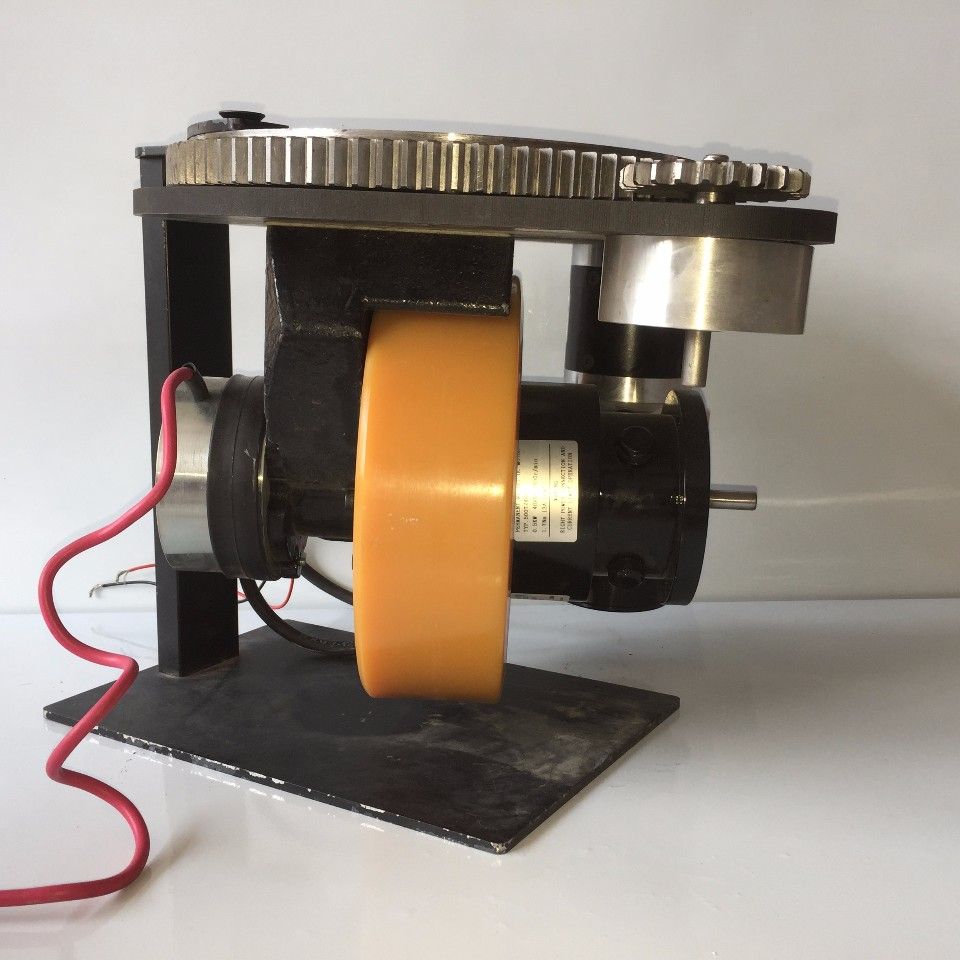
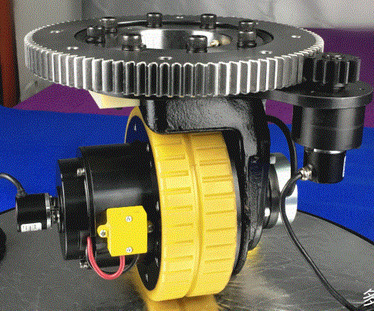
agv小车减速机 厦门AGV小车从动轮推荐
- 相关产品:
功率:200-1500W负载:0-10T定制:可以非标定制电压:直流48V或者24V速度:任意设置
AGV常用的车能主要有以下几种:
驱动轮 :车轮安装一个牵引电机,只驱动车轮前进或后退,但可以使驱动轮成组使 用,组成双轮差速驱动系统。
转向轮: 安装一个转向电机,只可以使轮子绕其中心作旋转运动,并无前进动力,不能驱动车体前进。
万向轮: 又称活动脚轮,可进行万向旋转,一般固定车体底盘下,起支撑作用。
定向轮: 即固定轮,只有一个自由度,安装车体下用于导引车体运动,保证车体行进过程中的稳定性。
目前使用较为广泛的 车轮包括球轮、正交轮、偏心轮、Mutual YoYo轮、Mecanum轮、轮毂电机和舵轮,它们的结构决定了它们的运动方式和使用场合。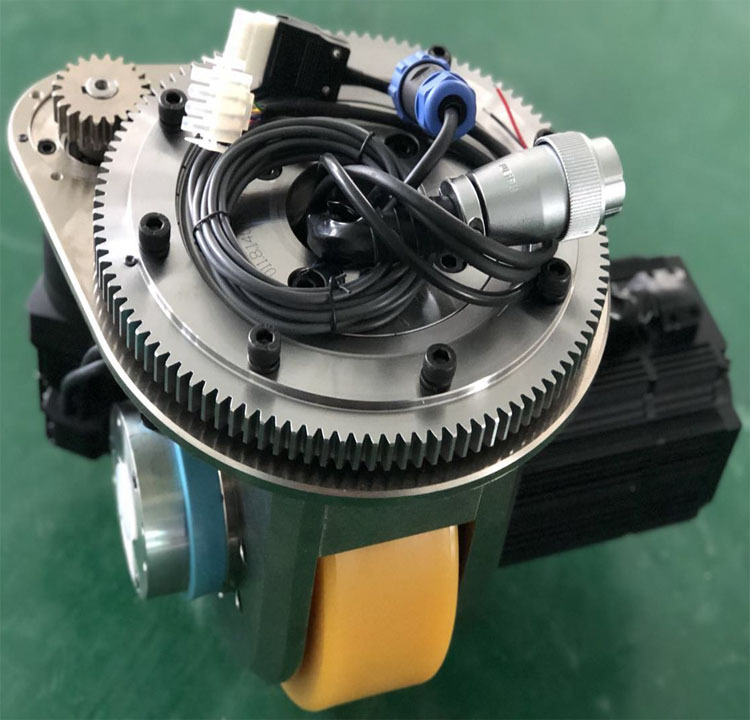
AGV属于轮式移动机器人,按照移动特性又可将移动机器人分为两种: 非移动机器人和移动机器人。物体在平面上的移动可产生前后,左右和自转3个自由度的运动。若所具有的自由度少于3个则为非移动机器人;若具有完全的3个自由度,则称为移动机器人。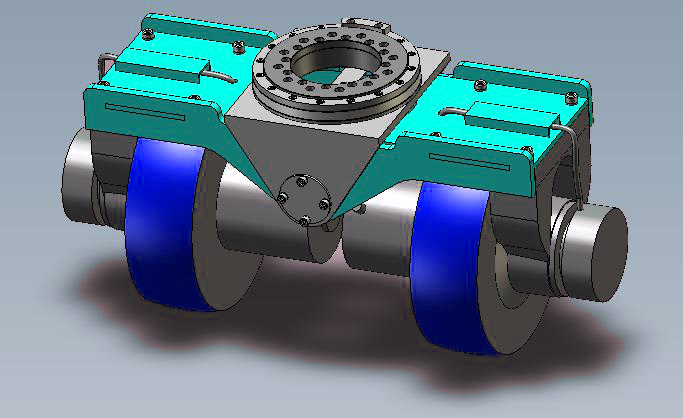
适用范围:10T-20TAGV搬运设备;
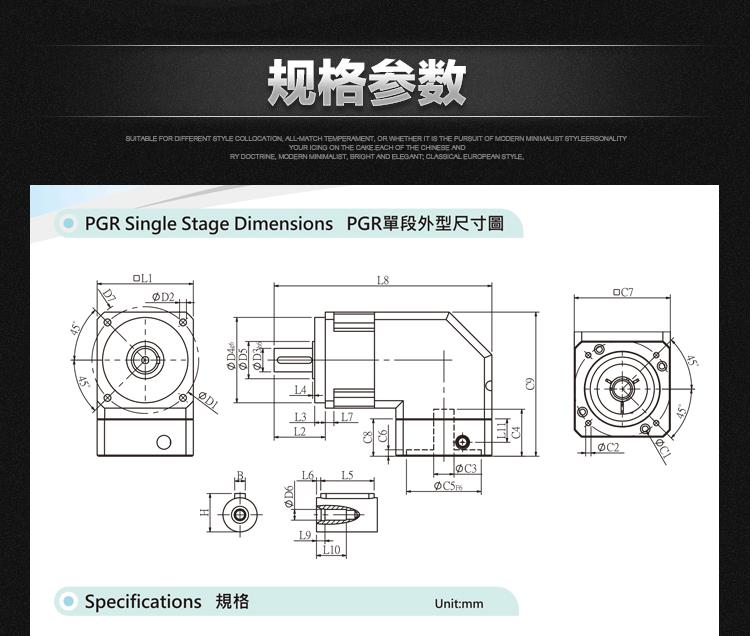
行走机构技术参数:
电机额定功率:2000W-5000W(三相异步交流电机);
电机类型:可选直流伺服电机(3KW-5KW);
额定载荷:3000KG-4500KG;
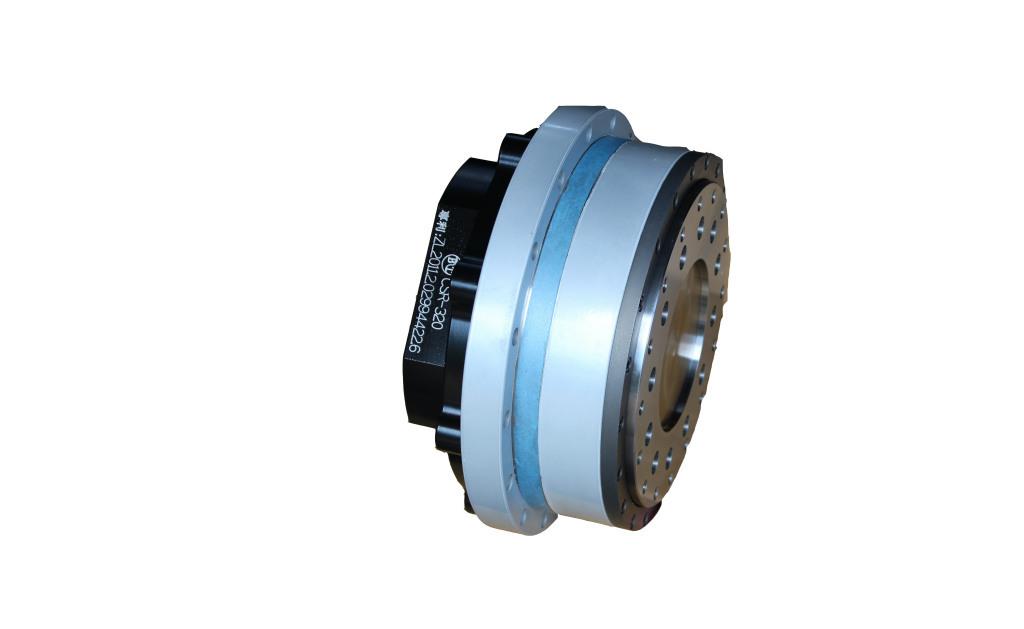
减速比:1:50(可选1:70-1:120);
轮径:300mm-500mm;
编码器脉冲:64;
转向机构技术参数:
电机额定功率:750W(直流伺服电机);
减速比:1:50;
编码器脉冲:10000。
AGV的结构主要有三轮结构、四轮结构、移动结构。三轮结构主要包括后轮驱动,前轮转向,前轮转向前轮驱动及两轮差速驱动能实现AGV的二自由度运动;四轮结构主要是分别四轮驱动及转向;移动机构主要包括麦克纳姆轮及舵轮形式。








{kind=link}