

- 2024-12-29 15:28 14134
- 产品价格:120.00 元/个 起
- 发货地址:上海金山 包装说明:不限
- 产品数量:9999.00 个产品规格:不限
- 信息编号:175522944公司编号:14217997
- 毛文珍 业务经理 微信 13817011982
- 进入店铺 在线留言 QQ咨询 在线询价
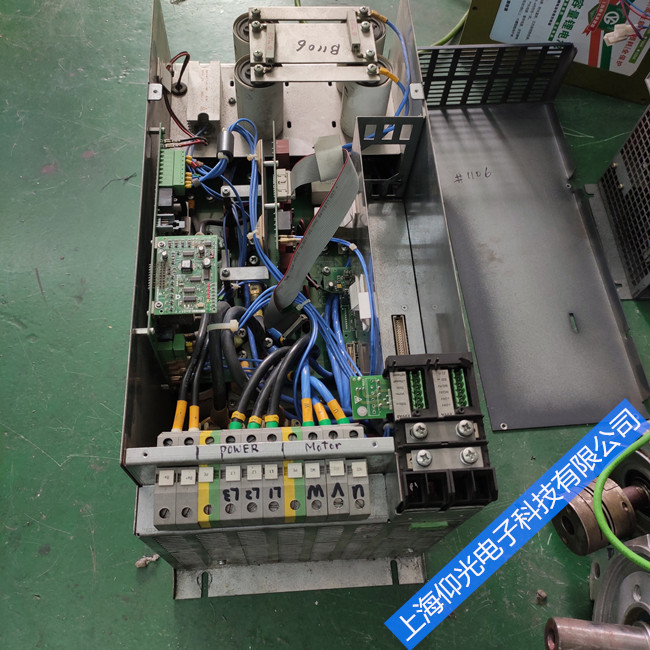
自贡包米勒伺服驱动器显示报警代码 放大器报警修理 修好测试好发货
- 相关产品:
维修公司:上海仰光电子维修项目:伺服驱动器维修产品:变频器伺服驱动器触摸屏数控系统等进口设备维修周期:1-7工作日修复率:99%维修点:上海质保期:半年维修人员:25
鲍米勒伺服电机控制器维修,鲍米勒伺服电机通电报警,过载,过压,过流,不能启动,启动无力。运行抖动,失磁,跑位,输出不平衡,编码器报警,编码器损坏,位置不准,通电跳闸,磁铁爆钢卡死转不动,电机发热发烫,电机运转异常,高速运转响声(噪音)大,刹车失灵等维修。上海仰光电子科技有限公司
鲍米勒伺服驱动器过载故障维修:
伺服驱动过载
1.故障原因①:负载过大,过载运行时间**出驱动器的过载保护时间。
解决对策:选择功率较大、过载能力较强的驱动器。
2.故障原因②:伺服电机抱闸不良,未完全打开。
解决对策:检查电机的抱闸线路。
3.故障原因③:电机和驱动器不适配
解决对策:选配更大功率的伺服驱动器。
4.故障原因④:驱动器周围的环境温度,**出其规格书要求值
解决对策:更换与驱动器匹配的电机。

鲍米勒伺服驱动器常见的故障有:上电无显示、有显示无输出、过电流、过电压、欠电压、过热、过载、过速、缺相、抖动、编码器异常、模块损坏、接地故障、参数错误等。
上海仰光电子科技有限公司
1:伺服驱动器空载正常,重载异常 2:伺服驱动器满载高速是否异常。
3:伺服驱动器满载低速是否正常。 4:伺服驱动器起动加速是否正常。
5:伺服驱动器起动减速是否正常。 6:伺服驱动器输出电压是否平衡。
7:伺服驱动器输出电流是否平衡。 8:伺服驱动器负载轻重变化时,电流是否正常。
1、示波器检查驱动器的电流输出端时,发现它全为噪声,无法读出
故障原因:电流输出端没有与交流电源相隔离(变压器)。
处理方法:可以用直流电压表检测观察。
2、电机在一个方向上比另一个方向跑得快
故障原因:无刷电机的相位搞错。
处理方法:检测或查出正确的相位。
故障原因:在不用于测试时,测试/偏差开关打在测试位置。
处理方法:将测试/偏差开关打在偏差位置。
故障原因:偏差电位器位置不正确。
处理方法:重新设定。
3、电机失速
故障原因:速度反馈的极性搞错。
处理方法:
a.如果可能,将位置反馈极性开关打到另一位置。(某些驱动器上可以)
b.如使用测速机,将驱动器上的TACH+和TACH-对调接入。
c.如使用编码器,将驱动器上的ENC A和ENC B对调接入。
d.如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
步:询问用户伺服驱动器的故障。
第二步:根据用户的故障描述,分析造成此类故障的原因。
第三步:打开被维修的设备,确认被损坏的器件,分析维修恢复的可行性。
第四步:根据被损坏器件的工作位置,阅读及分析电路工作原理,从中找出损坏器件的原因。

上海仰光电子科技有限公司
包米勒伺服驱动器系列维修。BUM60-30/60系列驱动器维修,BUM60-12/24系列驱动器维修,BUM60-60/120系列驱动器维修。BM4462-FI1系列驱动器维修,BUM618-12/18系列驱动器维修,BUM60S-04/08系列驱动器维修,BUM60S-08/12系列驱动器维修,BUM60S-12/24系列驱动器维修,BUS6-VC系列驱动器维修。
1.故障原因①:制动电阻未连接或阻值过大
电机处于制动工况时,负载侧向驱动器母线回馈能量,如果驱动器不能及时将这些能量通过制动电阻消耗,母线电压会不断,直到报出OU过压故障。
解决对策:检查制动电阻连接是否可靠,并确认制动电阻阻值是否符合产品说明书要求。
2.故障原因②:制动或减速时间过短
驱动器制动或者减速时间过小时,制动、减速工况时功率较大,**出制动单元所能承受值,导致母线电压**出设定值。
解决对策:在满足控制要求的条件下,调整驱动器的控制参数,例如适当增加(或延长)制动时间或减速时间。
3.故障原因:③电源输入电压过大
主要为电源侧冲击过电压,补偿电容在合闸或断开时形成的过电压等,主要特点电压变化率和幅值都很大。
解决对策:在电源输入侧增加吸收装置(并联浪涌吸收装置或串联电抗器等)。
工业自动化有限公司是一家从事**各类工业自动化产品维修*公司。主要维修的有西门子,ABB,AB,丹佛斯,施耐德,伦茨,富士,欧陆,三菱,发那科,科尔摩根,倍福,日机电装,穆格,贝加莱,鲍米勒,博世力士乐,ELAU,英格玛特,住友,神钢,信浓,多摩川,环球,宝德,路斯特,海德汉,福克斯波罗,霍尼韦尔等。公司设有多种的测试平台。BM4454-FI2-01243R05-03 包米勒伺服驱动器*维修

包米勒伺服驱动器系列维修。BUM60-30/60系列驱动器维修,BUM60-12/24系列驱动器维修,BUM60-60/120系列驱动器维修。BM4462-FI1系列驱动器维修,BUM618-12/18系列驱动器维修,BUM60S-04/08系列驱动器维修,BUM60S-08/12系列驱动器维修,BUM60S-12/24系列驱动器维修,BUS6-VC系列驱动器维修。
包米勒伺服电源系列维修,BUS20-80/160系列维修,BUS20-160/320系列维修,BU62-60/30系列电源维修,BUM25-30/60系列维修。
上海仰光电子科技有限公司
伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服马达进行控制,实现高精度的传动系统定位,目前是传动技术的产品。那如何伺服驱动器维修时如何测试呢?以下为伺服驱动器维修的方法。
1、示波器检查驱动器的电流输出端时,发现它全为噪声,无法读出
故障原因:电流输出端没有与交流电源相隔离(变压器)。
处理方法:可以用直流电压表检测观察。
2、电机在一个方向上比另一个方向跑得快
故障原因:无刷电机的相位搞错。
处理方法:检测或查出正确的相位。
故障原因:在不用于测试时,测试/偏差开关打在测试位置。
处理方法:将测试/偏差开关打在偏差位置。
故障原因:偏差电位器位置不正确。
处理方法:重新设定。
3、电机失速
故障原因:速度反馈的极性搞错。
处理方法:
a.如果可能,将位置反馈极性开关打到另一位置。(某些驱动器上可以)
b.如使用测速机,将驱动器上的TACH+和TACH-对调接入。
c.如使用编码器,将驱动器上的ENC A和ENC B对调接入。
d.如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
- 商家产品推荐
- 西门子伺服驱动器维修西门子直流调速器维修,西门子触摸屏维修,西门子PLC维修,西门子数控系统维修,西门子电源模块维 修,西门子人机界面维修,西门子伺服电机维修 西门子数控系统维修 西门子数控系统维修价格 西门子数控系统维修厂家 Rexroth伺服驱动器型号大全伺服放大器维修伺服报故障维修 力士乐伺服驱动器的常见故障代码和解决方法 伺服驱动器维修上海伺服驱动器维修伺服驱动器报故障维修力士乐伺服驱动器维修 西门子数控系统故障诊断的基本方法是什么 贝加莱伺服电机维修8MSA3S.R0-33换编码器绕线圈换轴承等故障维修 B&R 贝加莱伺服电机维修 驱动器维修 编码器维修 换轴承维修 等各种故障维修 维修 贝加莱伺服电机8LSA45.E3060D000-0短路 震动 换轴承 换线圈等故障维修 上海快速贝加莱伺服电机维修 DBL7N04000-B3M-0T0-S40线圈烧维修











{kind=link}