


- 2024-06-26 10:22 850
- 产品价格:28800.00 元/个 起
- 发货地址:广东东莞虎门 包装说明:不限
- 产品数量:9999.00 个产品规格:不限
- 信息编号:242714083公司编号:23089974
- 卢经理 总经理 微信 13794989064
- 进入店铺 在线留言 QQ咨询 在线询价
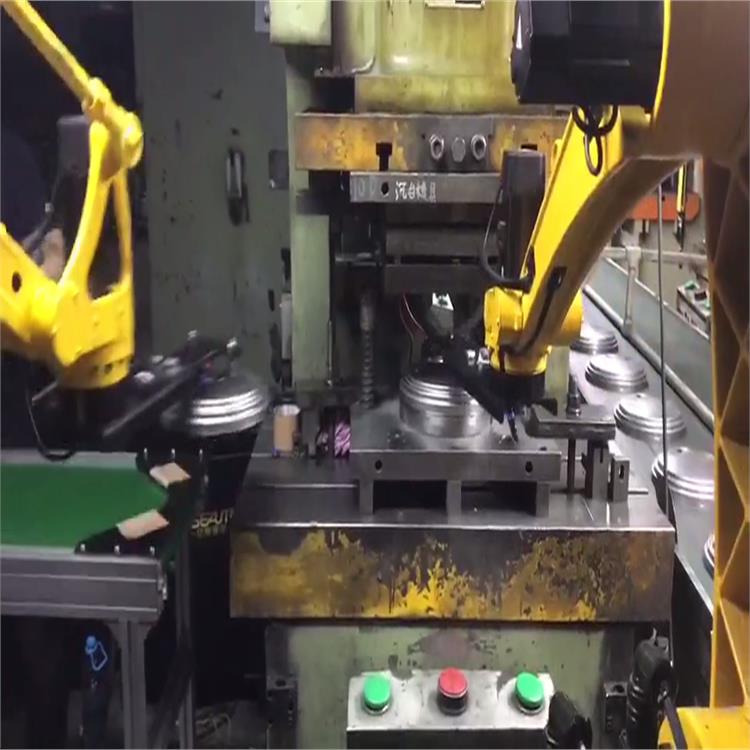
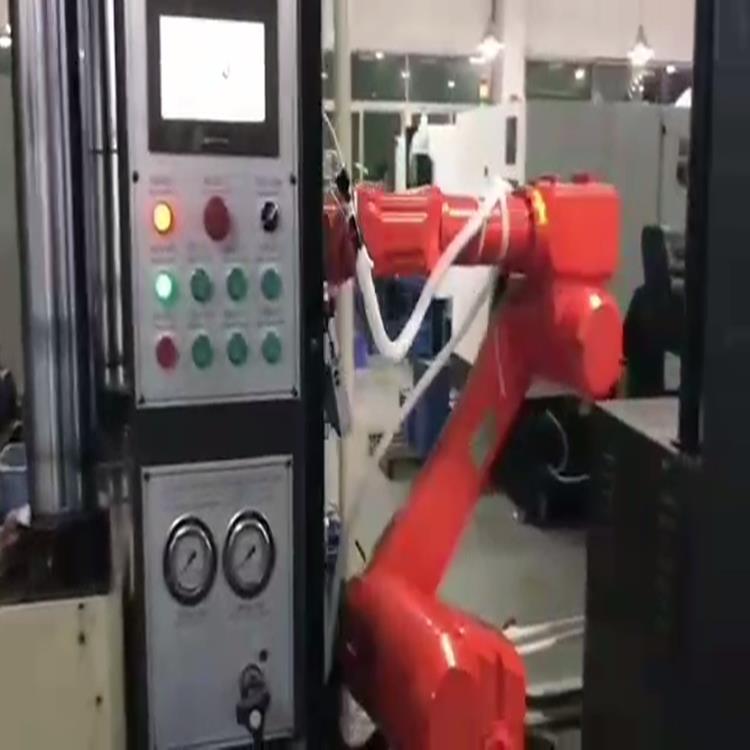
冲压机械手 杭州家电冲压机器人
- 相关产品:
负载:10kg臂长:1400mm颜色:蓝色重量:170kg重复精度:0.08mm控制系统:纳博特轴数:4轴
四轴机器人作用:四轴冲压机械手可以将多套模具安装在统一台冲床上生产主动化生产,削减冲床投资,四轴冲压机械手削减了延续冲压的模具投资与高速冲床的投资,以通俗的设备与模具实现主动化延续生产,适合产品拉伸生产,如高压锅、水杯、滤清器等产品,变换机种时仅须简单调试即可。冲压机器人的动态特性是怎样的呢
冲压机器人结构动态参数主要包括质量、惯性矩、刚度、阻尼系数、固有频率和振动模态。
设计时应该尽量减小质量和惯量。对于冲压机器人的刚度,若刚度差,机械手的位置精度和系统固有频率将下降,从而导致系统动态不稳定;但对于某些作业,适当地增加柔顺性是有利的,理想的情况是希望机械手臂杆的刚度可调。增加系统的阻尼对于缩短振荡的衰减时间、提高系统的动态稳定性是有利的。提高系统的固有频率,避开工作频率范围,也有利于提高系统的稳定性。

冲压机器人的有效负载指的是什么
冲压机器人的有效负载是指冲压机械手在工作时臂端可能搬运的物体重量或所能承受的力或力矩,用以表示机械手的负荷能力。
机械手在不同位置时,允许的可搬运重量是不同的,因此冲压机械手的额定可搬运重量是指其臂杆在工作空间中任意位置时端部都能搬运的重量。

工业冲压机器人是如何识别物体进行抓取任务的呢
从机器视觉的角度,由简入繁从相机标定,平面物体检测、有纹理物体、无纹理物体、深度学习、与任务/运动规划结合等6个方面深度解析文章的标题。
先,我们要了解,机器人领域的视觉跟计算机领域的视觉有一些不同:机器视觉的目的是给机器人提供操作物体的信息。所以,机器视觉的研究大概有这几块:
1、物体识别:在图像中检测到物体类型等,这跟 CV 的研究有很大一部分交叉;
2、位姿估计:计算出物体在摄像机坐标系下的位置和姿态,对于机器人而言,需要抓取东西,不仅要知道这是什么,也需要知道它具体在哪里;
3、相机标定:因为上面做的只是计算了物体在相机坐标系下的坐标,我们还需要确定相机跟机器人的相对位置和姿态,这样才可以将物姿转换到机器人位姿。

自动冲压机器人的工作空间是怎样的呢
1、通常冲压冲压机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。因此,在设计和选用时,要注意安装末端执行器后,冲压机器人实际所能达到的工作空间。
2、冲压冲压机器人说明书上提供的工作空间往往要小于运动学意义上的空间。这是因为在可达空间中,手臂位置不同时有效负载、允许达到的速度和加速度都不一样,在臂杆位置允许的限值通常要比其他位置的小些。此外,在可达空间边界上可能存在自由度退化的问题,此时的位置称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度退化现象,这部分工作空间在冲压机器人工作时都不能被利用。
3、除了在工作空间边缘,实际应用中的冲压机械手还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。空腔是指在工作空间内臂端不能达到的完全封闭空间。而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
我们公司协同应用商致力于机器人换人,为客户提供全冲压、焊接、码垛搬运、机床上下料、喷涂、抛光打磨机器人自动化生产解决方案!










{kind=link}