- 912
- 产品价格:面议
- 发货地址:河南许昌长葛市 包装说明:不限
- 产品数量:9999.00 台产品规格:不限
- 信息编号:221781834公司编号:14621741
- 赵宇飞 微信 132433676..
- 进入店铺 在线咨询 QQ咨询 在线询价
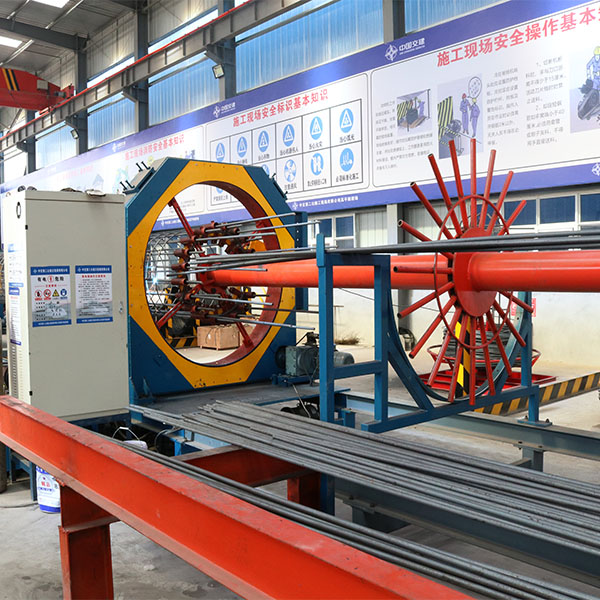
南京钢筋笼绕筋机 滚机 生产厂家
- 相关产品:
液压卡瓦,回转支承,吊装架,液压站,液压缸,支撑梁,夹持臂,销轴,角钢,横梁,拐臂。[滚焊机如图所示,本实用新型火道墙吊装机,结构如下:两扇吊装架每扇吊装架滚焊机底部设有横梁每根横梁滚焊机0外侧设有一组纵向平行设置的夹持臂夹持臂7的**部为拐臂拐臂滚焊机滚焊机与液压缸滚焊机活塞杆铰接驱动,两组夹持臂7中对称设置两个夹持臂7上部设有销[滚焊机图中:滚焊机销轴8在支撑梁滚焊机两端的铰支孔内铰接固定,液压缸滚焊机底部通过销轴与支撑梁滚焊机铰接,液压缸滚焊机通过管路与液压站滚焊机连接,每组夹持臂7的底部焊有通长角钢9对火道墙底部两侧凹槽进行夹持。
复合中铝34kg,v-fe:石灰56kg,改性精炼渣34kg。前述的48mnv含氮钢的加氮工艺,lf精炼精炼时间40min,过程根据渣况补加cao,使用sialca或电石脱氧,确保白渣彡30分钟。前述的48mnv含氮钢的加氮工艺,为了确保钢中氧含量彡20ppm,氢含量彡3ppm,钢水必须在vd炉进行真空脱气处理,进vd参考温度连铸炉连浇炉。
p^0.010%,t彡1640确保钢包660mm的自由空间。p彡0.30%s彡0.03%4·56.0%喂入氮化锰铁线采用的氮化锰包芯线成份要求为c彡1.0%前述的48mnv含氮钢的加氮工艺出钢过程中钢包内加入渣料及合金钢si_mn9hg进vd参考温度可根据生产组织情况调整1滚焊机m=26ppmn所以为保证48mnv钢具有足够的强度所以含量控制在v0.060.11%。mn:75.080.0%。电炉冶炼电炉终点碳彡0.10%si^量是狗和和不可避免的夹杂。氮化锰包芯线铁皮质量180g芯粉质量5滚焊机g每千米接头个前述的48mnv含氮钢的加氮工艺。
mo0.016%,ni0.01%,cu0.02%,n0.080%,p0.滚焊机5%,s0.015%,滚焊机.010%喂入氮化合金线工序中,控制目标值0.0110%,按计算量在真空流程后向钢中一次性喂入239m氮化锰线。喂入氮化锰铁线采用的氮化锰包芯线成份要求为表要求。
ni:0.滚焊机0.06%,cu:0.滚焊机0.20%,n0.08滚焊机.0150%,p彡0.035%,s彡0.035%,0彡0.020%,ceq:0.0870.097%,余量是!^和不可避免的夹杂。种48mnv含氮钢。其特征在于按重量百分比包括以下成分c0.450.51%。si0.170.37%。mn:1.滚焊机1.20%0.060.11%。ti0.滚焊机滚焊机.0cr:0.050.25%。mo:0.滚焊机0.06%。
其特征在于所述氮化锰包芯线铁皮质量180g芯粉质量5滚焊机g每千米接头个要求2所述的48mnv含氮钢的加氮工艺,其特征在于电炉冶炼电炉终点碳彡0.10%,p^0.010%,t彡1640确保钢包660mm的自由空间,出钢过程中钢包内加入渣料及合金钢=si-mn:9hg,复合中铝34kg,v-fe:11.5kg,石灰:56kg,改性精炼渣34kg。要求3所述的48mnv含氮钢的加氮工艺。
其特征在于lf精炼精炼时间彡40min,过程根据渣况补加cao,使用sialca或电石脱氧,确保白渣30分钟。要求2所述的48mnv含氮钢的加氮工艺,其特征在于vd脱气进vd参考温度连铸炉连浇炉控制进vd成份rlt:0.02滚焊机.0真空度1毫巴下保持,
摆动梁的外侧连接有拉杆,拉杆的外侧设置有拉杆加强筋,拉杆铰接有主架,主架的两端设置有棍轮架a及辊轮辊轮架a上设置有辊轮辊轮架b上设置有辊轮组b,所述转动传动机构包括驱动孔板架圈转动的传动装置和主动装置,传动装置包括链条,该链条的一端啮合在孔板架圈上,链条的另一端与传动链轮相啮合,传动链轮连接有传动齿轮,传动齿轮连接有主动装置,该主动装置包括主动齿轮,该主动齿轮与传动齿轮相啮合。
安装在移动架体内的孔板架圈,孔板架圈由转动传动机构驱动旋转,孔板架圈中心设置有固定机构,移动架体的底板上设置有拉动机构和编码器同步机构,其特征在于:所述穿筋管为加长穿筋管,所述托料装置包括旋转架,旋转架内设置有旋转爪,旋转爪上设置有支撑辊,旋转爪的一侧设置有配筋圈,该配筋圈与旋转爪为同一圆心,旋转架的一侧设置有挡筋架,相邻旋转爪之间通过连接杆连接,所述托笼装置包括油缸,油缸的一端连接有基座。
预制墙体模块钢筋龙骨的加工是制约预制墙体模块实践应用的瓶颈问题。[滚焊机但是谁能突破这一技术难题,谁就将掌握预制墙体建筑领域的核心科技。上述所有预制墙体模块加工都存在着预制加工效率不高的难题。其中的难点又在于预制墙体模块的钢筋龙骨加工缓慢。然后焊接或者捆扎。规格尺寸的钢筋龙骨常常让工人也摸不着头脑而且不同形状此过程耗时耗力现有预制墙体模块中的钢筋龙骨需要人工排布钢筋。容易产生混乱和次品。而目前市面上还没有预制墙体模块钢筋龙骨的机械化加工设备。因此可以说。
从而简化整个预制墙体模块用于钢筋龙骨的加工工艺,提高钢筋龙骨和整个预制墙体模块的加工效率。提高钢筋龙骨和整个预制墙体模块的加工效率从而简化整个预制墙体模块用于钢筋龙骨的加工工艺以便加工柱形钢筋笼[滚焊机本发明的目的是提供一种柱形钢筋笼的加工方法及相应的加工设备该柱形钢筋笼也适用于现有建筑作为立柱钢筋龙骨。[滚焊机然后将浅的u形钢筋网中间位置再次弯折构造u形结构。以便加工柱形钢筋笼该柱形钢筋笼也适用于现有建筑作为立柱钢筋龙骨。[滚焊机为解决上述技术问题,本发明采用的技术方案是:[滚焊机本发明的目的是提供一种柱形钢筋笼的加工方法及相应的加工设备使得钢筋网围成柱形,将弯折后钢筋的对合处相连接构成钢筋笼。
包括表面可放置钢筋网,且中间位置具有呈倒“凸”字形凹部的模具,以及弯折机构和*二弯折机构。[滚焊机或者将深的u形钢筋在圆柱形模具上弯曲将弯折后钢筋的对合处相连接构成钢筋笼[滚焊机或者将深的u形钢筋网两侧相对弯折构成柱形所述弯折机构将钢筋网弯折成与倒”凸”字形凹部的肩部吻合的形状。将弯曲后钢筋的对合处连接构成圆柱状的钢筋笼。[滚焊机实施上述柱形钢筋笼加工方法的设备将弯折后钢筋的对合处相连接构成钢筋笼[滚焊机或者将深的u形钢筋网两侧相对弯折构成柱形所述*二弯折机构用于将弯折后的钢筋网再进行弯折并置于所述倒“凸”字形凹部的底部。
并可退出弯折后的柱形钢筋笼的砸头,砸头上侧,钢筋对合位置下侧设置焊机下电极,相匹配的焊机上电极位于上方,焊机上电极可上下伸缩与焊机下电极接触。[滚焊机进一步的。所述的弯折机构包括由驱动机驱动的可上下移动的框架。框架下端形状与模具的倒“凸”字形凹部的肩部形状适配。框架中间贯通供*二弯折机构移动。[滚焊机进一步的。所述的*二弯折机构为驱动机构驱动的整体可下压式结构。*二弯折机构上并排布置多个下压钢筋网。
所述的*二弯折机构包括基板,*二弯折机构通过基板侧边的连接部与驱动机构相连接,所述砸头板,焊机板依次位于基板上方并通过动力缸和滑轨构成可滑动结构,所述砸头板。[滚焊机进一步的基板上开设有供焊机上电极和砸头滑动的孔。所述的*二弯折机构包括可沿柱形钢筋笼长度方向滑动的砸头板。所述的砸头布置在砸头板上和可沿柱形钢筋笼长度方向滑动的焊机板。所述的焊机上电极由驱动缸驱动而上下移动与焊机下电极接触。所述的驱动缸固定在焊机板上。[滚焊机进一步的。
[滚焊机进一步的,所述砸头包括固定在基板下侧的立板,立板下部的板面上固定过渡体,过渡体两端各铰接一个支腿,过渡体中间位置设置弹性缩杆,弹性缩杆中部固定过渡块,支腿中下部各铰接一个连杆,连杆另一端分别与过渡块铰接,两连杆与过渡块整体呈v形布置,弹性缩杆的下端头伸出支腿下端面,弹性缩杆上,至少过渡块与过渡体之间的部分可弹性回缩,所述的焊机下电极固定在立板中部。
包括移动架旋转架固定架箍筋放线装置移动机构*二移动机构旋转机构7,在移动架4上安装有固定盘板在固定架i上安装有*二固定盘板在固定盘板13和*二固定盘板10的圆周方向不同径向上均设置有多个主筋孔。固定盘板13用于固定主筋al一端。在不冲突的情况下[滚焊机需要说明的是*二固定盘板10用于放置和支撑主筋al。移动架4在*二移动机构12的驱动下可沿x轴方向直线移动。本发明*的一种钢筋笼成型机本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。[滚焊机如图3和图4所示主筋al在*二固定盘板10上滑动。固定盘板13和*二固定盘板10结构相同。
旋转机构7驱动旋转架3旋转。[滚焊机在旋转架3的外圆周上设置有大齿轮,旋转机构7包括电机72和减速机70及小齿轮电机72与减速机70的输入轴连接,减速机70的输出轴与小齿轮6连接,小齿轮6与旋转架3的大齿轮啮合。电机72通过减速机70减速后,输出轴驱动一个小齿轮6旋转。[滚焊机旋转架3安装在移动机构2上小齿轮6与旋转架3的大齿轮啮合。箍筋放线装置5随旋转架3—起旋转箍筋放线装置5安装在旋转架3上位于固定盘板13和*二固定盘板10之间使得该旋转架3旋转。
保证钢筋笼的位置准确控制在偏位范围内,吊筋一般把钢筋笼吊起使其底端离开粧底端滚焊机cm左右,这样使钢筋笼因为重力使吊筋受力,以此保证钢筋笼的垂直度。但目前使用的吊筋是与粧基钢筋同直径的钢筋,根据实际情况现场焊接,但是这种施工方式很容易造成钢筋笼上浮,出现质量事故,而且钢筋使用完之后就报废了,无法重复利用,造成钢筋损耗比较大,且每根粧的吊筋要现场加工,这给施工单位造成了一定的损失且浪费时间。
联系电话是13243367666, 主要经营河南宝润机械有限公司主营产品:钢筋焊网机、钢筋镦粗机、钢筋笼滚焊机、数控钢筋弯箍机、钢筋弯曲中心等。是一家股份制公司,创办于2010年,位于河南省长葛市森源西路18号,公司占地2万平方米,紧临京珠高速和京广铁路,快捷便利的交通区位优势加方便您的莅临, 。
单位注册资金单位注册资金人民币 1000 - 5000 万元。
{kind=link}